Bowei Li 李博伟
M.S. Student, Department of Electrical and Computer Engineering
Carnegie Mellon University
I am a Master's student at the Department of Electrical and Computer Engineering, Carnegie Mellon University, advised by Prof. Changliu Liu in the Intelligent Control Lab. My research spans robot learning, scalable robot data generation, long-horizon manipulation, and agentic robot policies.
I received my Bachelor's degree in Telecommunication Engineering jointly from Xidian University and Heriot-Watt University. During my undergraduate studies, I worked at the Digital Governance Engineering Research Center led by Prof. Huailiang Liu on sentiment analysis, and was also remotely advised by Prof. Ran Zhang from UNC Charlotte on reinforcement learning for UAV communications.
Email: boweili [at] andrew [dot] cmu [dot] edu
Publications
* denotes equal contribution. Author names in bold indicate me.
BrickCraft: Visuomotor Skill Composition with Situated Manual Guidance
arXiv preprint, 2026
@article{yu2026brickcraft,
title = {BrickCraft: Visuomotor Skill Composition with Situated Manual Guidance},
author = {Yu, Jichuan and Li, Bowei and Tang, Zhenran and Lu, Guanxing and Hu, Chuxiong and Liu, Ruixuan and Liu, Changliu},
journal = {arXiv preprint arXiv:2605.07605},
year = {2026}
}
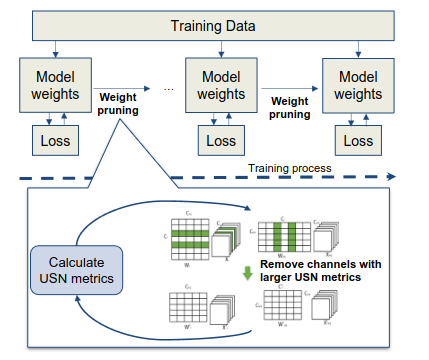
Enhancing Certifiable Semantic Robustness via Robust Pruning of Deep Neural Networks
arXiv preprint, 2025
@article{hu2025enhancing,
title = {Enhancing Certifiable Semantic Robustness via Robust Pruning of Deep Neural Networks},
author = {Hu, Hanjiang and Li, Bowei and Wang, Ziwei and Wei, Tianhao and Hutchison, Casidhe and Sample, Eric and Liu, Changliu},
journal = {arXiv preprint arXiv:2510.00083},
year = {2025}
}
NeSyPack: A Neuro-Symbolic Framework for Bimanual Logistics Packing
RSS 2025 Workshop on Benchmarking Robot Manipulation · First Prize, WBCD Competition @ ICRA 2025
abstract · bibtex · arXiv · video
@article{li2025nesypack,
title = {NeSyPack: A Neuro-Symbolic Framework for Bimanual Logistics Packing},
author = {Li, Bowei and Yu, Peiqi and Tang, Zhenran and Zhou, Han and Sun, Yifan and Liu, Ruixuan and Liu, Changliu},
journal = {arXiv preprint arXiv:2506.06567},
year = {2025}
}
SPARK: A Modular Benchmark for Humanoid Robot Safety
IFAC Symposium on Robotics, 2025
abstract · bibtex · arXiv · code · project page
@inproceedings{sun2025spark,
title = {SPARK: Safe Protective and Assistive Robot Kit},
author = {Sun, Yifan and Chen, Rui and Yun, Kai S. and Fang, Yikuan and Jung, Sebin and Li, Feihan and Li, Bowei and Zhao, Weiye and Liu, Changliu},
booktitle = {IFAC Symposium on Robotics},
year = {2025}
}
IEEE Transactions on Cognitive Communications and Networking, vol. 12, pp. 175–188, 2025
@article{li2025when,
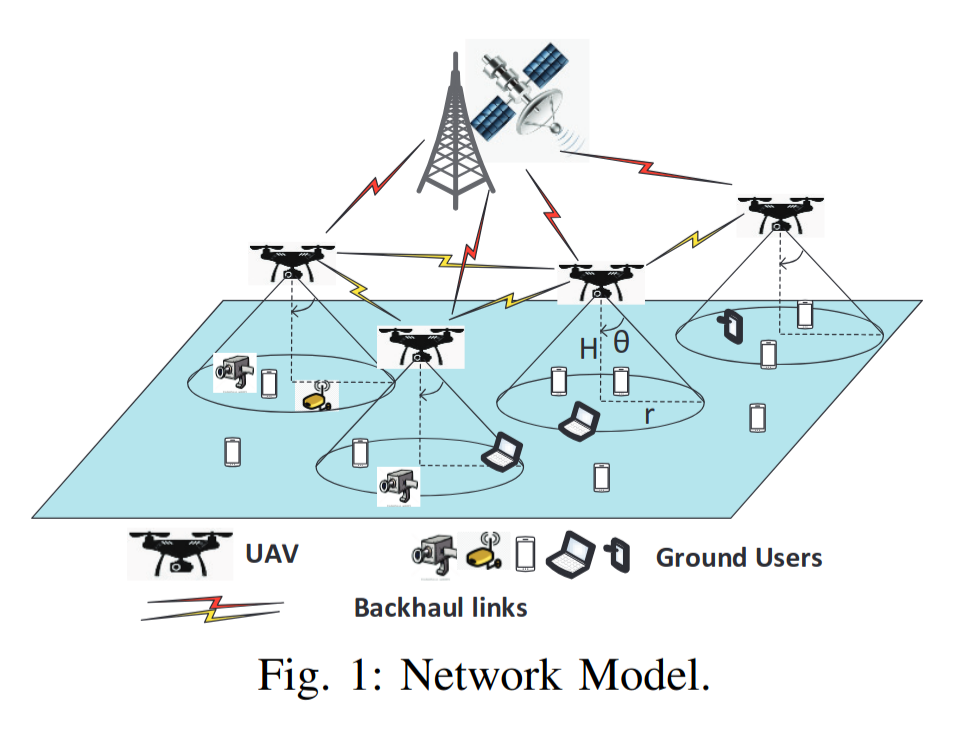
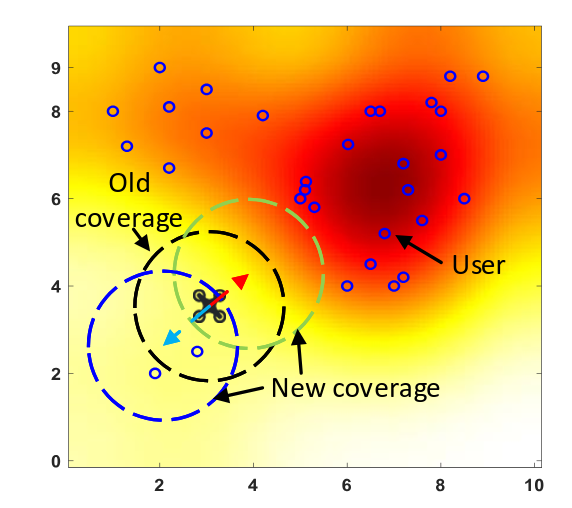
title = {When Learning Meets Dynamics: Distributed User Connectivity Maximization in UAV-Based Communication Networks},
author = {Li, Bowei and Tripathi, Saugat and Hosain, AKM Salman and Zhang, Ran and Wang, Miao and Xie, Jiang},
journal = {IEEE Transactions on Cognitive Communications and Networking},
volume = {12},
pages = {175--188},
year = {2025}
}
IEEE Communications Magazine, 2025
@article{zhang2025learning,
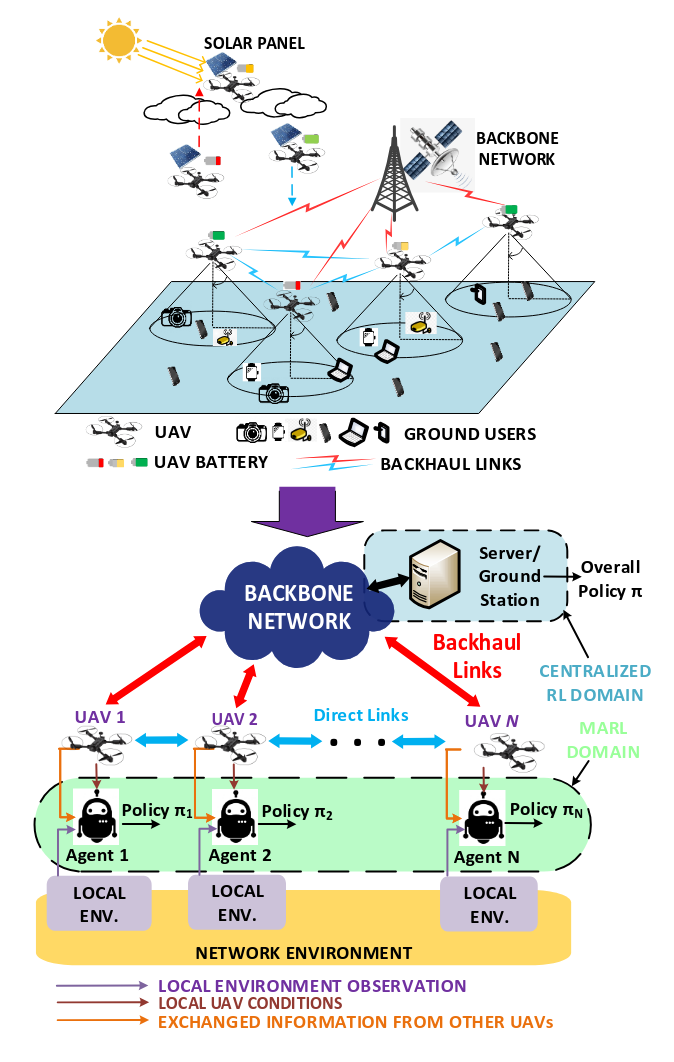
title = {Learning with Dynamics: Autonomous Regulation of UAV-Based Communication Networks with Dynamic UAV Crew},
author = {Zhang, Ran and Li, Bowei and Zhang, Liyuan and Xie, Jiang and Wang, Miao},
journal = {IEEE Communications Magazine},
year = {2025}
}
IEEE International Conference on Communications (ICC), pp. 530–535, 2025
@inproceedings{li2025maximizing,
title = {Maximizing User Connectivity in AI-Enabled Multi-UAV Networks: A Distributed Strategy Generalized to Arbitrary User Distributions},
author = {Li, Bowei and Xu, Yang and Zhang, Ran and Xie, Jiang and Wang, Miao},
booktitle = {IEEE International Conference on Communications (ICC)},
pages = {530--535},
year = {2025}
}
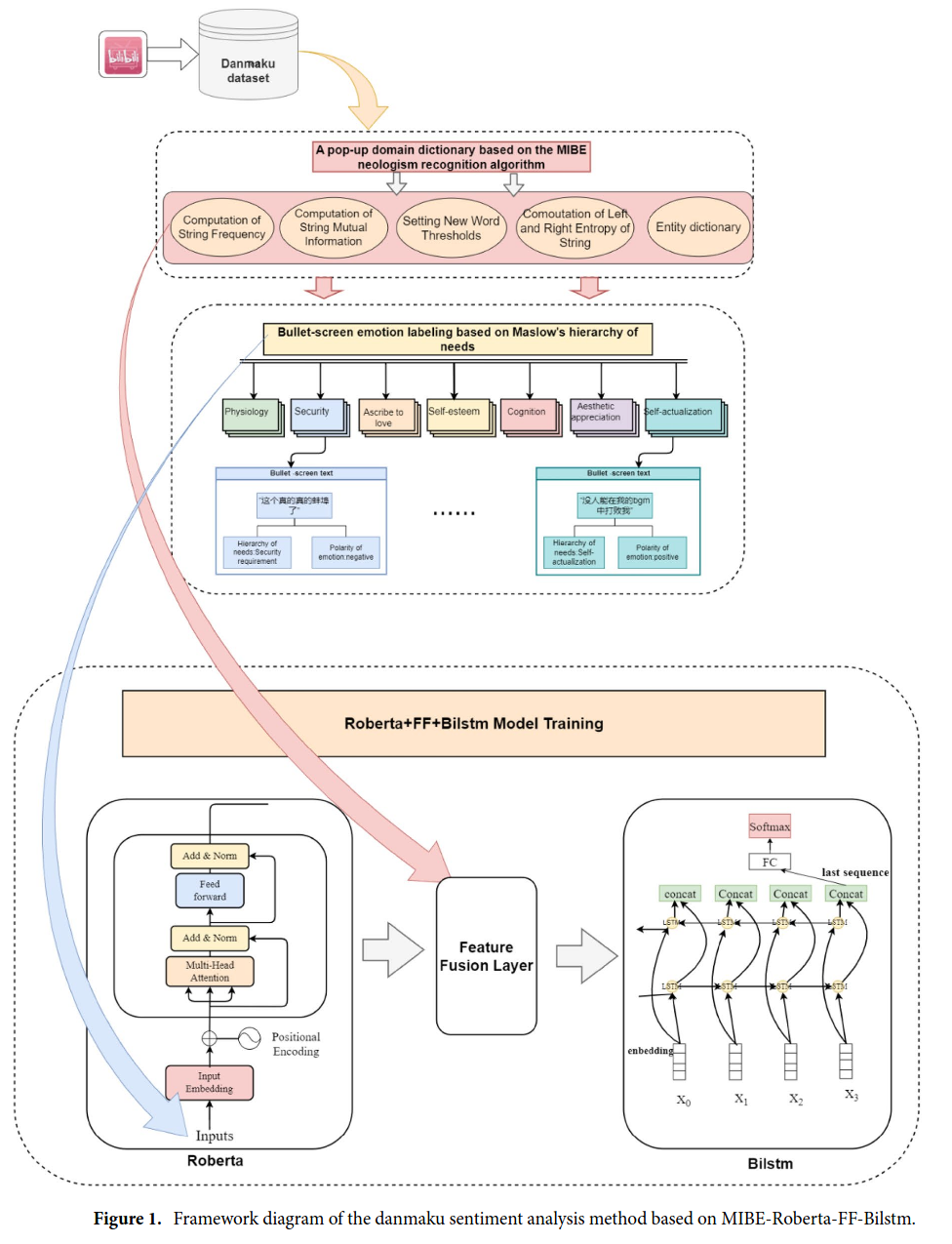
Sentiment Analysis of Video Danmakus Based on MIBE-RoBERTa-FF-BiLSTM
Scientific Reports, 14(1):5827, 2024
@article{zhao2024sentiment,
title = {Sentiment Analysis of Video Danmakus Based on MIBE-RoBERTa-FF-BiLSTM},
author = {Zhao, Jianbo and Liu, Huailiang and Wang, Yakai and Zhang, Weili and Zhang, Xiaojin and Li, Bowei and Sun, Tong and Qi, Yanwei and Zhang, Shanzhuang},
journal = {Scientific Reports},
volume = {14},
number = {1},
pages = {5827},
year = {2024}
}
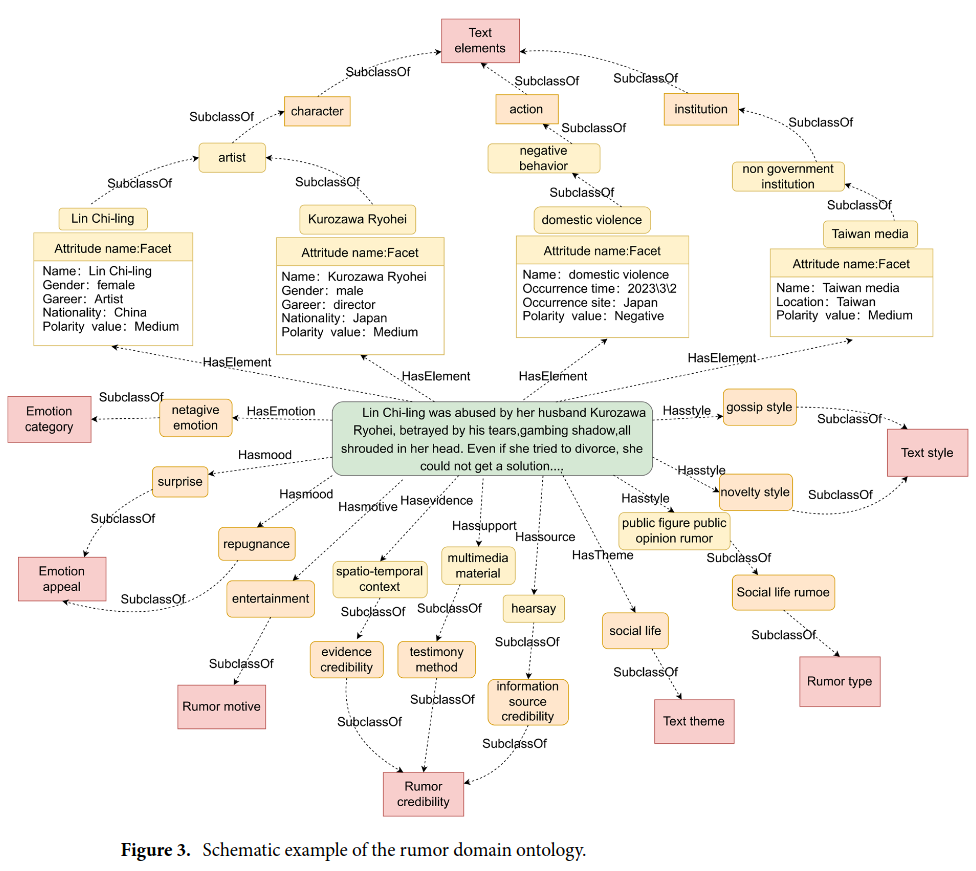
Research on Domain Ontology Construction Based on the Content Features of Online Rumors
Scientific Reports, 14(1):12134, 2024
@article{zhao2024research,
title = {Research on Domain Ontology Construction Based on the Content Features of Online Rumors},
author = {Zhao, Jianbo and Liu, Huailiang and Zhang, Weili and Sun, Tong and Chen, Qiuyi and Wang, Yuehai and Cheng, Jiale and Zhuang, Yan and Zhang, Xiaojin and Zhang, Shanzhuang and others},
journal = {Scientific Reports},
volume = {14},
number = {1},
pages = {12134},
year = {2024}
}